1 .机车定位目前机车定位主要靠轮速传感器和GPS/北斗定位。使用轮速传感器累计里程存在误差累积问题,GPS定位精度易受信号干扰和遮挡,在山区误差较大,在隧道内无法工作。位置新率只有1Hz ,..
愿景:连接你我、连接世界、连接未来!使命:让员工更幸福、让列车更安全!观:创造美好、体验美好、共享美好! 关系网:我们与所有的合作伙伴是一种共生共荣的关系,初始阶段由如世界的两个点..
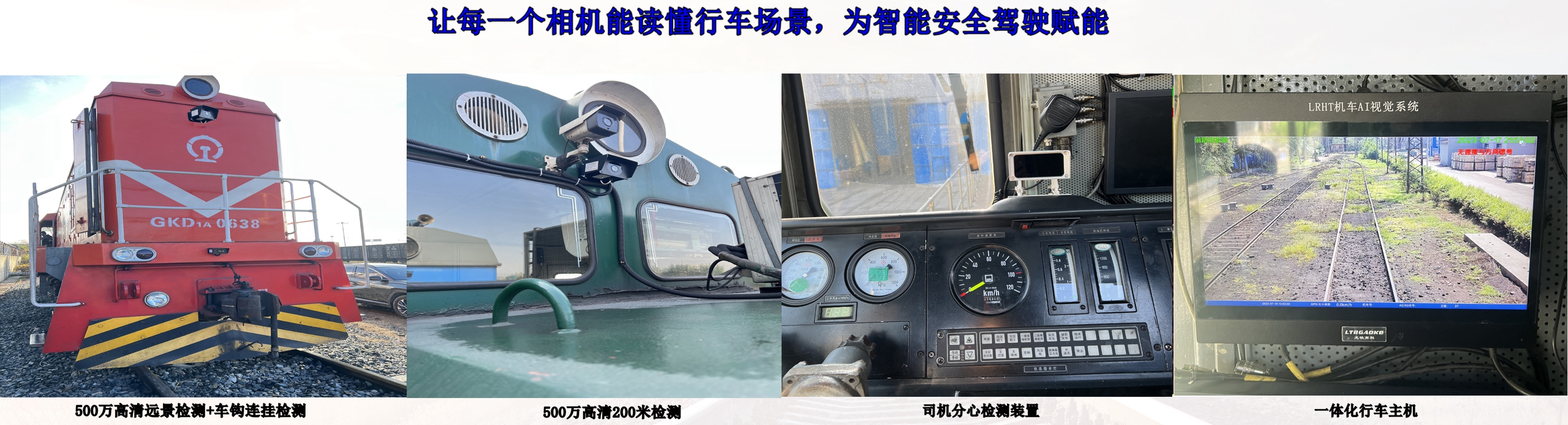
产品推荐
友情链接